Аппаратура радиоуправления
Комплект аппаратуры радиоуправления - это, зачастую, самый дорогой компонент радиоуправляемой системы. Но экономить на нем крайне нежелательно. В радиоаппаратуру обязательно должна быть заложена возможность развития конструкции вашего квадрокоптера, в противном случае сиюминутная экономия может обернуться дополнительными расходами спустя один-два года. Причем управление квадрокоптером высоко поднимает планку минимальных требований по сравнению с самолетами и даже вертолетами.
В общем случае аппаратура радиоуправления состоит из пульта радиоуправления (передатчика) и приемника. Основными параметрами являются протокол кодирования сигнала и количество каналов передачи команд. Рабочую частоту мы не рассматриваем, т. к. в настоящее время практически вся аппаратура работает на частоте 2,4 ГГц, и другие варианты скорее относятся к экзотическим явлениям, хотя при дальних полетах по FPV применяется и аппаратура с рабочими частотами 40 и 72 МГц, сигналы которых меньше подвержены затуханию и интерференции на сложных рельефах. Протокол кодирования сигнала означает способ, которым команды, полученные с органов управления пульта, "упакованы" в поток данных, проходящий через радиоканал. При разработке протоколов руководствуются помехоустойчивостью и плотностью потока информации. Существуют как проприетарные протоколы, которые использует только один производитель аппаратуры, так и более массовые. Каждый из них имеет свои достоинства и недостатки.
Подробный разбор и анализ протоколов вряд ли уместен в книге для начинающих.
На первом этапе протокол, как таковой, вообще не будет иметь значения. Заострим ваше внимание лишь на том, что протокол передатчика и протокол приемника должны быть одинаковыми. Это кажется очевидным, но по невнимательности вполне можно купить неподходящий приемник. Например, если ваш передатчик работает с протоколами DSM2/DSMX, нужно искать приемник именно для этих протоколов. Существуют передатчики со сменными передающими модулями, а также поддерживающие разные протоколы. Это особенно удобно, когда надо приобрести передатчик, совместимый с уже имеющимся квадрокоптером заводского изготовления или разными приемниками.
Параметр, который принципиально важен, - количество каналов. Для управления квадрокоптером их нужно как минимум четыре:
• общий газ (Throttle);
• тангаж (вперед-назад, Pitch);
• крен (вправо-влево, Roll);
• рыскание (вращение в плоскости полета, Yaw).
На самом деле, этого очень мало и хватит вам лишь для пробного взлета. Во-первых, нужны каналы для управления включением сенсоров и режимов полетного контроллера. Например, удержание высоты по барометру, включение/выключение компаса, удержание позиции или возврат домой по GPS. Во-вторых, могут понадобиться каналы для управления бортовой видеокамерой, бортовыми огнями или включения системы поиска упавшего аппарата. Комфортное управление квадрокоптером начинается при восьми и более каналах. Благо, сейчас даже недорогие передатчики и приемники способны поддерживать до 14 каналов. Количество каналов приемника и передатчика не обязательно должно совпадать. Если передатчик поддерживает двенадцать каналов, а приемник восемь, значит в вашем распоряжении только восемь каналов, остальные будут недоступны.
Итак, пульт радиоуправления состоит из аналоговых (стики) и дискретных (переключатели и тумблеры) органов управления, микроконтроллера, который оцифровывает и кодирует сигналы органов управления, радиопередающей части, дисплея и батареи питания. В качестве дополнительных модулей могут присутствовать приемник-декодер сигналов телеметрии и дисплей для отображения данных телеметрии и сигнала с бортовой видеокамеры. Благодаря наличию микроконтроллера, большинство пультов поддерживает гибкие настройки, позволяющие произвольно устанавливать связь между каналом и органом управления, инвертировать сигнал и устанавливать коэффициент пропорциональности между отклонением стика и изменением сигнала, а также менять количество каналов и прочие параметры потока данных.
В зависимости от расположения стиков управления различают передатчики типа Mode 1 и Mode 2. У передатчиков первого типа слева расположен стик Pitch-Roll, a справа Throttle-Yaw. У передатчиков второго типа, соответственно, наоборот. Более массовыми являются передатчики типа Mode 2, потому что большинству пользователей-правшей психологически удобнее интенсивно управлять положением летательного аппарата правой рукой, а левой периодически регулировать газ. Это вопрос сугубо личного комфорта и привычки. На рис. 1.3 изображено расположение стиков для режима Mode 2.
К выбору расположения стиков при покупке следует отнестись очень ответственно, т. к. недостаточно изменить назначение стиков в меню или переключить провода в пульте. Узлы правого и левого стиков имеют разную конструкцию. Стик Pitch-Roll подпружинен по двум направлениям и при отпускании возвращается в центральную позицию. Стик Throttle-Yaw подпружинен только по оси Yaw, а газ при отпускании стика не уходит в центр. Поэтому для переделки Mode 1 в Mode 2 или наоборот необходимо поменять местами узлы стиков или переставить детали этих узлов.
Не для каждого пульта это возможно. Предварительно ознакомьтесь с отзывами на тематических форумах или задайте вопрос продавцу.
Важно, чтобы фабричное качество пульта соответствовало вашим потребностям на перспективу. Дешевым пультам китайских производителей присущи люфты механической части, малая износостойкость и низкое качество переменных резисторов узла стиков, высокая погрешность оцифровки положения стиков. Вследствие низкого качества пульта могут возникнуть отрицательные явления.
• Джиттер - "дрожание" значения управляющего сигнала при неподвижном стике. Джиттер возникает как сумма погрешностей оцифровки, кодирования в передатчике и обратного раскодирования в приемнике.
• Температурный дрейф - значения управляющих сигналов сдвигаются вверх или вниз на некую величину при изменении температуры пульта. Соответственно, в нейтральном положении стиков управляющие сигналы перестают быть нейтральными. В дешевой аппаратуре дрейф иногда бывает настолько сильным, что мешает переключать режимы и управлять квадрокоптером в зимнее время.
Экземпляры одной и той же марки из разных партий могут быть по-разному подвержены дрейфу. Для проверки рекомендуется охладить пульт в холодильнике до -10…-15 градусов и проверить параметры сигнала. Это можно сделать при помощи специальных программ для компьютера или смартфона, о которых мы расскажем далее.
• Дискретность - значения управляющих сигналов при смещении стика изменяются не плавно, а скачками. Это мешает точному пилотированию хорошо настроенного аппарата. Разумеется, цифровой сигнал по определению меняется дискретно, однако в качественной аппаратуре с высокой разрядностью дискретизации шаг изменения небольшой и не мешает точному пилотированию. Величина дискретности также влияет на джиттер.
Для управления мультикоптерами начального и среднего уровня не требуются какие-либо специальные приемники. Подойдет любой, совместимый с имеющимся пультом, приемник с числом каналов от шести и более. Четырехканальный приемник подойдет только для первого включения и пробных взлетов, далее количества каналов быстро станет недостаточно.
Функция Failsafe
При внезапном пропадании управляющего сигнала вследствие достижения предельной дальности, эфирной помехи или поломки аппаратуры система радиоуправления должна отработать один из вариантов поведения:
• либо сохранить последние принятые значения управляющих сигналов;
• либо установить значения управляющих сигналов в некие заранее заданные значения.
Первый вариант довольно опасен для длительной защиты: если в момент потери управления аппарат перемещался с большой скоростью или набирал высоту, то он продолжит это делать и может улететь очень далеко и безнадежно потеряться или причинить ущерб окружающим. Поэтому такой вариант защиты встроен в логику работы цифрового приемника и автоматически срабатывает при кратковременном выпадении нескольких пакетов данных.
Второй вариант более безопасен, лучше подходит при длительном пропадании сигнала и позволяет реализовать различные алгоритмы для минимизации ущерба.
Применительно к квадрокоптеру реализация зависит от комплектации.
• Без GPS-навигации. Сигнал газа выставляется в положение, соответствующее достаточно быстрому, но безопасному снижению, чтобы коптер не унесло далеко ветром, а ущерб от падения был минимальным. Сигналы управления положением выставляются в среднее положение (горизонталь), включается режим автостабилизации горизонта. Режим удержания высоты по барометру отключается, либо включается режим удержания минимальной высоты, когда коптер зависает не ниже заданного значения. Рекомендуется также задать медленное вращение по Yaw, чтобы положение приемной антенны менялось в пространстве. Это дает шанс в каком-то положении принять неустойчивый сигнал и вернуть управление. Если есть поисковый маячок, то включить его. В итоге при срабатывании Failsafe коптер должен остановиться, выровняться и относительно безопасно приземлиться.
• При наличии GPS-навигации. Сигнал газа выставляется в положение, соответствующее висению. Сигналы управления положением выставляются в среднее положение (горизонталь), включается режим автостабилизации горизонта. Включается функция "возврат домой". Включается барометр, в прошивке контроллера должно быть задано значение высоты, на которой происходит возврат к точке старта, и высоты, на которой квадрокоптер зависает после возвращения. Например, если полет может происходить над лесом, то квадрокоптер должен возвращаться, гарантированно пролетая выше самых высоких деревьев. В итоге при срабатывании Failsafe квадрокоптер должен сам вернуться к месту старта и зависнуть на заданной высоте.
Даже если вы не планируете автоматические полеты по заданному маршруту, наличие приемника GPS очень полезно с точки зрения сохранности квадрокоптера. А если вы собираетесь использовать дорогую видеокамеру в комплекте с бесколлекторным гироподвесом и качественным видеопередатчиком, то приемник GPS является обязательным устройством, поскольку именно он вернет вам оборудование общей стоимостью более тысячи долларов в случае потери управления.
Функция Failsafe может быть реализована как приемником, так и полетным контроллером. Что лучше? Лучше не лениться и настроить оба варианта. Вероятность внезапного и полного отказа приемника во время полета невелика, но не равна нулю. В случае полного отказа приемника функцию Failsafe реализует полетный контроллер. Некоторые приемники не имеют встроенной защиты от потери связи, в этом случае вся надежда только на контроллер.
Модуляция сигнала РРМ
Обычный многоканальный приемник получает по радиоканалу кодированный последовательный сигнал управления, декодирует его и "раскладывает" по отдельным выходам приемника для каждого канала. Параметры сигнала на выходе индивидуального канала определяются единым общепризнанным стандартом и не зависят от типа кодирования в передатчике или марки производителя. Статьи на тему популярных стандартов кодирования в аппаратуре радиоуправления писали или переводили все, кому не лень. В том числе и люди, далекие от радиотехники, что породило изрядную смысловую и терминологическую путаницу. Давайте разберемся по порядку.
Стандарт кодирования PPM (Pulse Position Modulation - фазово-импульсная модуляция) очень старый и популярный, поскольку может формироваться и обрабатываться без использования микроконтроллеров, при помощи обычных интегральных счетчиков и таймеров. Сейчас нечасто можно встретить передатчик с классической модуляцией сигнала РРМ, разве что в китайских игрушках с инфракрасным пультом, но мы разберем этот стандарт подробно. Ведь каким бы способом сейчас не передавали информацию по радиоканалу, на выходе декодера обычного приемника мы имеем импульсы радиоуправления со строго определенными параметрами, которые исторически происходят от РРМ и не меняются для обеспечения совместимости между оконечным (управляемым) оборудованием и массовой радиоаппаратурой разных производителей.
Итак, обратимся к рис. 2.9, на котором схематично изображен стандартный сигнал РРМ для четырех каналов.
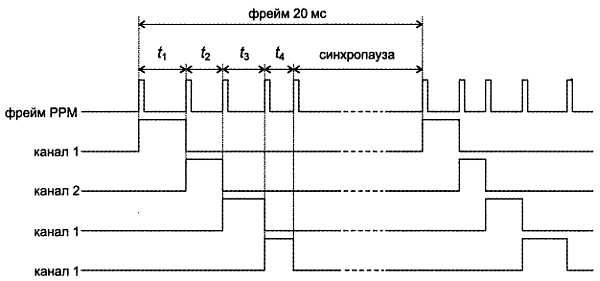
Рис. 2.9.Сигнал РРМ и его раскладка по каналам управления
Сигнал РРМ состоит из фреймов (frame) длительностью 20 мс. В свою очередь, фрейм состоит из стробирующих импульсов, которые разделяют каналы, и синхропаузы, благодаря наличию которой приемник начинает ожидать следующий кадр.
Как видно из диаграммы, расстояние tx между фронтами соседних синхроимпульсов соответствует длительности импульса в канале приемника. То есть, можно сказать, что в сигнале РРМ информация канала содержится в положении (position) стробирующего импульса относительно начала фрейма или предыдущего строба. Длительность стробирующих импульсов лежит в диапазоне 100–400 мкс. При помощи синхропаузы приемник опознает начало следующего фрейма, затем, опираясь на стробирующие импульсы, распределяет импульсы управления по ка-налам. Для надежного разделения фреймов длительность синхропаузы должна быть не менее 2500 мкс. В противном случае приемник может не опознать начало следующего фрейма и отправить на выходы каналов непредсказуемые импульсы.
В свою очередь, импульсы на выходе отдельного канала следуют с периодом в 20 мс (т. е. с частотой 50 Гц), и меняется их ширина. Такое кодирование информации называют PWM (Pulse Width Modulation) или ШИМ (широтно-импульсная модуляция). Иными словами, в приемнике сигнал РРМ превращается в разделенные по каналам сигналы PWM. Именно эти импульсы PWM мы до сих пор получаем на канальных выходах приемников, даже самых современных. Исключение составляют приемники с последовательным выходным каналом, но об этом позже.
Поскольку именно длительность импульса в канале несет в себе информацию, параметры этого импульса стандартизованы: минимальная - 1000 мкс, средняя - 1500 мкс, максимальная - 2000 мкс. Обязательно запомните диапазон этих значений, они фигурируют в настройках квадрокоптера и пригодятся вам в дальнейшем.
Производители аппаратуры позволяют задать в настройках более широкий диапазон значений, порядка 800-2200 мкс, но в квадрокоптерах такие значения обычно не применяются.
В стандартный сигнал РРМ с фреймом длительностью 20 мс можно упаковать не более восьми каналов (обычно шесть-семь). Проблема в ограничении минимальной длительности синхропаузы. Давайте посчитаем вместе. Представьте ситуацию, когда по восьми каналам надо передать импульсы максимальной длительности t1…t8= 2000 мкс. Тогда суммарная длительность канальных импульсов составит 8·2000 = 16 000 мкс, а для синхропаузы останется 20 000-16 000 = 4000 мкс. Этого более чем достаточно для надежной работы приемника. Но если добавить девятый канал, то на долю синхропаузы останется 20 000 - 9·2000 = 2000 мкс. С такой синхропаузой декодер стандартного приемника не сможет опознавать начало фрейма и разделять каналы. Если же передатчик формирует канальные импульсы с максимальной длительностью 2200 мкс, то в стандартный фрейм не поместятся даже восемь каналов. Поэтому производители аппаратуры идут на ухищрения и увеличивают длину фрейма. Таким способом удается уместить в сигнал РРМ до 14 каналов. Благо, в большинстве современных пультов можно настраивать длину фрейма, длину строба и количество каналов. Чтобы приемник распознавал такой, не вполне стандартный, сигнал, его приходится прошивать соответствующей прошивкой. Недостатком этого подхода является проблема совместимости приемников и передатчиков.
Существенным недостатком формата РРМ является отсутствие контроля над качеством принимаемых данных. Если помеха исказила импульсы внутри фрейма, то они в искаженном виде попадут на выход приемника. Некоторые современные приемники РРМ, оснащенные микроконтроллерами, могут отфильтровывать заведомо ошибочные импульсы в каждом канале управления по отдельности. Алгоритм фильтрации частично похож на алгоритм цифрового подавления помех в звуке или изображении. Приемник сохраняет в памяти параметры импульсов в каждом канале и сравнивает их с вновь поступившими. Считается, что в нормальной ситуации длительности импульсов от фрейма к фрейму могут измениться лишь в определенных разумных пределах. Если приемник обнаруживает аномально изменившиеся импульсы, он считает их недостоверными и заменяет их длительность значениями из предыдущего фрейма. Таким образом происходит отработку укороченной функции Failsafe по каждому каналу в отдельности. Попутно приемник копит информацию о количестве "испорченных" импульсов, и когда оно превышает критический порог в единицу времени, приемник уходит в глубокий Failsafe, как описано в предыдущем разделе.
Формат сигналов РСМ
Импульсно-кодовая модуляция PCM (Pulse Code Modulation) применяется для повышения помехоустойчивости канала управления. Единого стандарта РСМ не существует, производители используют собственные несовместимые протоколы. В итоге аппаратура РСМ разных производителей взаимно несовместима, а соревнование протоколов по сути сводится к борьбе за кошельки покупателей, которых каждый производитель привязывает к своему оборудованию.
В протоколах РСМ данные также передаются стандартными блоками, или пакетами. Пакет состоит из цифровых значений для каждого канала управления, служебной информации, контрольной суммы и синхроблока. Избыточность данных не предусмотрена. Если контрольная сумма не сходится, пакет отбрасывается, а на выходах приемника сохраняется предыдущее состояние (быстрый Failsafe). При накоплении количества ошибок выше критического предела или при полном пропадании пакетов включается глубокий Failsafe.
Количество импульсов в пакете РСМ существенно больше, чем во фрейме РРМ. Но импульсы нельзя чрезмерно укорачивать, т. к. при этом увеличивается ширина спектра излучаемого радиосигнала, жестко ограниченная нормами. Поэтому в общем случае пакет данных РСМ получается длиннее, а скорость по протоколу РСМ ниже. Применяя оптимизацию протокола, удается сократить длительность пакета до 20 мс и меньше. Например, в каждом пакете можно передавать информацию только о быстро меняющихся каналах или чередовать каналы, для которых передается информация.