Двигатели
Двигатели, применяемые в авиамоделях, делятся на два больших семейства: коллекторные и бесколлекторные. Устройство коллекторного двигателя вы должны знать из школьного курса физики. Для тех, кто забыл, очень кратко напомним.
Коллекторный двигатель состоит из неподвижных Магнитов, прикрепленных к корпусу (статор) с чередованием полюсов и нескольких катушек, смонтированных на валу (ротор). Напряжение на катушки ротора поступает через скользящие контакты (коллектор и щетки). При подаче напряжения на катушку ротора, вокруг нее формируется магнитное поле. Катушка отталкивается от полюса одного из магнитов статора и притягивается к другому. В этот момент происходит переключение полярности питания за счет вращательного смещения контактов коллектора относительно щеток и катушка начинает притягиваться к следующему магниту. Коллекторный двигатель- это классический пример самоуправляемой системы, он сам себе переключает полярность катушек в нужный момент во время вращения. Направление вращения зависит от полярности питающего напряжения, а частота вращения от величины напряжения.
В бесколлекторных двигателях коммутация катушек происходит при помощи специальной электронной схемы - регулятора оборотов (Electronic Speed Controller, ESC). Независимо от количества катушек и схемы их внутренней коммутации бесколлекторный двигатель авиамодели всегда имеет три вывода, подключаемые к регулятору. Регулятор подает на эти выводы питающее напряжение со сдвигом по фазе. Поскольку выводы катушек подключены к регулятору неразрывно, то катушки смонтированы неподвижно и являются статором, а вращается ротор с прикрепленными к нему постоянными магнитами. Направление вращения зависит от подключения выводов двигателя к регулятору. Для изменения направления вращения достаточно поменять местами два любых вывода. Существуют более сложные конструкции двигателей, оснащенные датчиком оборотов и подключаемые к специальным регуляторам. В этом случае для изменения направления вращения необходимо перепрограммировать регулятор.
Если магниты расположены снаружи относительно катушек, такие двигатели называют аутраннерами (outrunner); если катушки расположены снаружи, а внутри вращается намагниченный ротор - инраннерами (inrunner). В квадрокоптерах и большинстве авиамоделей применяют аутраннеры. Удельная мощность и КПД бесколлекторного двигателя существенно зависит от мощности постоянных магнитов ротора, поэтому обычно используются неодимовые магниты. Они приклеены на внутреннюю сторону ротора. Если двигатель уронить на твердую поверхность, от удара магниты могут отклеиться или треснуть.
Внимание!
Трещина может быть незаметна глазу, но приведет к снижению мощности двигателя и может вызвать пропуски фазы и даже заклинивание двигателя отвалившимся осколком магнита прямо во время полета.
Коллекторные двигатели имеют низкие КПД, удельную мощность и моторесурс. Но их конструкция проще, они дешевле и не требуют сложного регулятора для работы. В свою очередь бесколлекторные двигатели практически не изнашиваются, если не считать выхода из строя дешевых китайских подшипников. При помощи регулятора оборотов можно организовать различные режимы: плавный разгон, торможение, ограничение по току, защиту от включения заблокированного двигателя.
Относительно недавно главным недостатком бесколлекторных двигателей была высокая цена, на 40–70 % больше, чем у коллекторных двигателей аналогичной мощности, и моделисты были вынуждены изготавливать их самостоятельно, перематывая двигатели от приводов CD и видеомагнитофонов. Сейчас появились недорогие бесколлекторные двигатели в широчайшем ассортименте, поэтому выбор между коллекторными и бесколлекторными двигателями зависит от области применения.
Коллекторные двигатели по-прежнему широко применяются в миниатюрных моделях, в том числе и в квадрокоптерах "наладонного" размера. В ситуации, когда идет борьба за каждый грамм веса, в миниатюрных коллекторных двигателях используют бескаркасные (coreless) катушки ротора. Отсутствие отдельного регулятора оборотов также существенно снижает общий вес, поскольку для управления оборотами коллекторного двигателя достаточно одного транзистора, управляемого сигналом с полетного контроллера. Ограниченный ресурс примитивного коллекторно-щеточного узла компенсируется дешевизной двигателя. Бесколлекторные двигатели для миниатюрных квадрокоптеров существуют, но дефицитны и стоят очень дорого, поскольку столь ювелирную конструкцию сложно изготавливать серийно.
С увеличением мощности двигателя возрастают коммутируемые токи в обмотках. Например, для двигателя квадрокоптера пиковые рабочие токи величиной 20–40 А - это обычное явление. Щеточный узел для таких токов должен иметь графитовые щетки и мощный коллектор с большим пятном контакта, что существенно усложняет и утяжеляет конструкцию, сводя на нет выгоды бесколлекторного двигателя. Более того, сильнейшие помехи от искрящих щеточных узлов четырех моторов могут не только забить сигналы управления и GPS, но и вызвать сбои в работе бортовой электроники. Поэтому в квадрокоптерах, начиная с диагонали 160 мм, коллекторные двигатели обычно не применяются.
Важным параметром бесколлекторного двигателя является его паспортная скорость вращения, измеряемая в оборотах на вольт питающего напряжения (обозначается как kV). В квадрокоптерах применяются низкооборотистые, по модельным меркам, двигатели с kV = 400-1200. Здесь мы плавно переходим к разговору о воздушных винтах, потому что двигатель и винт образуют единую винтомоторную пару, и правильнее будет рассуждать об оптимальном сочетании двух составляющих этой пары.
Воздушные винты
Не углубляясь в основы аэродинамики, рассмотрим общие принципы подбора винтомоторной пары. Основными параметрами винта являются диаметр, шаг и количество лопастей. Диаметр измеряется, как диаметр круга, образуемого при вращении винта. Шаг винта - это расстояние, пройденное винтом за один оборот при "ввинчивании" в условную твердую среду. Увеличение шага винта повышает тягу при малых оборотах. Все винты, кроме совсем миниатюрных, имеют переменный шаг и профиль лопасти. Внимательно рассмотрев винт, вы увидите, что ближе к законцовке угол атаки лопасти уменьшается, а ее профиль становится более плоским.
Зачем так делают? При движении точек по окружности с одинаковой угловой скоростью, чем дальше от центра вращения, тем выше линейная скорость точки. Концевая часть лопасти движется со значительно большей линейной скоростью, чем корневая. Поэтому, чтобы сделать нагрузку на лопасть равномерной по всей длине (а точнее, дать больше нагрузки на прочную корневую часть), используют переменный профиль. В противном случае лопасти начнут выгибаться во время вращения даже при небольшой тяге, а также начнется срыв воздушного потока ближе к концам лопастей.
При вращении винт создает подвижный воздушный поток, движущийся в направлении, противоположном направлению вектора тяги. Поскольку квадрокоптеры очень медленно перемещаются по вертикали, обычно применяется сочетание двигателей с низкими оборотами и винтов с большим шагом.
Почему не рекомендуется использовать для квадрокоптеров моторы с высокими оборотами в паре с винтами малого шага? Для достижения максимального КПД скорость потока, создаваемого винтом, должна быть соотносима со скоростью перемещения модели. В статическом состоянии, когда квадрокоптер висит, мощность "быстрой" винтомоторной пары расходуется крайне непродуктивно по причине возникающих завихрений и срывов потока в плоскости вращения винта. Упрощенно говоря, при неподвижной или медленно движущейся модели "быстрый" винт вхолостую перемалывает воздух, находясь в неблагоприятной турбулентной среде. При этом резко возрастает потребляемый ток и возможен перегрев двигателя.
На начальном этапе надо запомнить два простых интуитивных правила:
• рабочие обороты двигателя и шаг винта находятся во взаимно обратной зависимости;
• чем больше диаметр винта, тем меньше должны быть рабочие обороты двигателя.
Второе правило также нетрудно обосновать практическими соображениями. Маленький винт даже при большом шаге не может создать достаточную удельную тягу, если обороты невелики. Если рассматривать квадрокоптер как единую массоэнергетическую систему, то чем крупнее квадрокоптер, тем выше КПД системы в целом. В маленьких "наладонниках" очень велика доля веса немасштабируемых или плохо масштабируемых элементов конструкции (микросхемы, провода, батарейка и т. д.) относительно развиваемой тяги. Кроме того, КПД малогабаритных винтов тоже невелик, т. к. плотность воздуха есть величина постоянная и при масштабировании винта не меняется. В силу этих причин наладонные нанокоптеры, как правило, могут нести в воздухе лишь самих себя, и то недолго. В то же время крупные коптеры могут летать существенно дольше и нести большую нагрузку.
Одной из основных характеристик бесколлекторного двигателя является количество оборотов на один вольт питающего напряжения (kV). Для квадрокоптеров с диагональю 450–600 мм, как правило, оптимальными являются двигатели с kV 800-1200 и винты размера 8-11" с шагом около 4,7". В каждом конкретном случае потребуется произвести экспериментальный подбор оптимальных винтов под двигатель и нагрузку, т. к. винты даже одного размера, но от разных производителей, могут существенно различаться по динамическим характеристикам. Кроме того, производители двигателей, особенно недорогих, зачастую грешат недостоверностью характеристик.
Подбор оптимальной винтомоторной пары - это, по сути, параметрическая оптимизация системы, где в качестве параметров участвуют также полетный вес системы в сборе, максимальная токоотдача, вес батареи и т. д. Для удобства оптимизации разработаны специальные программы и онлайн-приложения, о которых мы поговорим позднее.
При подборе винтов следует учитывать не только развиваемую тягу, но и способность лопастей винта эту тягу удержать не деформируясь. Лопасти дешевых пластиковых винтов выгибаются под нагрузкой, теряя оптимальный профиль и КПД. Поэтому многие моделисты предпочитают использовать более дорогие, но прочные и легкие карбоновые винты. Кроме того, пластиковые винты склонны к флаттеру - самовозбуждающимся колебаниям лопастей винта, которые происходят за счет энергии воздушного потока. Внешне флаттер выражается в появлении характерного "грязного" жужжащего звука при вращении винта и визуальном размытии краев плоскости вращения, если смотреть на вращающийся винт сбоку. Однако нужно уметь отличать флаттер от вибрации несбалансированной винтомоторной пары. Методы балансировки мы обсудим в части II книги.
Надо особо отметить, что звук работающей винтомоторной пары для моделиста очень важен и информативен. Опытному моделисту он без приборов говорит о многом: обороты, нагрузка на двигатель, качество балансировки, появление флаттера на определенных оборотах, сбои в работе регулятора оборотов. Поэтому многие пилоты, практикующие полеты по видеокамере (FPV), не ограничиваются каналом видео и добавляют канал звука, чтобы слышать двигатели в работе.
Регуляторы оборотов
Как мы уже говорили ранее, регуляторы оборотов бесколлекторного двигателя представляют собой самостоятельное устройство на основе микроконтроллера. Несмотря на внешнюю простоту решаемой задачи - коммутировать ток в обмотках бесколлекторного двигателя - микроконтроллер регулятора работает по весьма сложному алгоритму. Современный регулятор должен:
• автоматически определять величину напряжения силовой батареи;
• иметь защиту от перегрузки по току;
• иметь защиту от запуска при механически заблокированном двигателе;
• автоматически подстраиваться под количество полюсов конкретного двигателя;
• иметь защиту от срыва синхронизации фазы.
Последние два пункта, пожалуй, следует раскрыть подробнее. В зависимости от конструкции, двигатель может содержать различное количество полюсов катушек статора и магнитов ротора. Коммутация тока в обмотках должна происходить синхронно (в фазе) с перемещением магнитов ротора, как бы "подгоняя" их. Если алгоритм коммутации не соответствует числу полюсов или регулятор пытается придать двигателю ускорение, которое двигатель не может развить по причине слабых магнитов или неудачной конструкции, происходит срыв синхронизации, "проскок" фазы коммутации обмоток статора относительно реального положения магнитов ротора. При срыве синхронизации равномерный высокочастотный свист работающего двигателя нарушается щелчками или хрипением, иногда можно визуально наблюдать рывки во вращении пропеллера. Срыв синхронизации может произойти также при просадке силового питающего напряжения в момент пиковой нагрузки.
Кроме вышеупомянутых опций, регуляторы для квадрокоптеров должны обеспечивать особо острый отклик моторов на изменения управляющих сигналов, поступающих с контроллера. От этого напрямую зависит стабильность и управляемость мультикоптера. С другой стороны, квадрокоптеру не нужны самолетные режимы плавного разгона и торможения пропеллера. Напротив, такие режимы вредны. Поэтому для использования на квадрокоптерах разработаны специальные регуляторы. Точнее, разработаны специальные прошивки для микроконтроллера в регуляторе.
Из открытых проектов прошивок наиболее популярны SimonK и BLHeli. При желании и наличии опыта можно самостоятельно прошить подходящие регуляторы, однако в настоящее время можно без труда приобрести готовые, прошитые нужной прошивкой контроллеры (рис. 2.21). Это существенно сэкономит ваше время, а в случае неудачной прошивки и деньги.
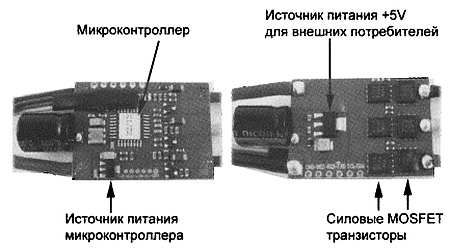
Рис. 2.21.Регулятор оборотов бесколлекторного двигателя
Регуляторы обычно крепят снаружи на лучи рамы, обеспечивая им хороший обдув. Отдельно следует упомянуть специальные комбо-регуляторы для квадрокоптеров, когда четыре регулятора и источник питания бортовой электроники смонтированы в одном корпусе (рис. 2.22). По сути, это четыре одинаковых независимых регулятора, которые объединены лишь общей печатной платой.

Рис. 2.22.Комбинированный четырехканальный регулятор
Достоинствами такой конструкции являются отсутствие разветвителя силового питания и короткие силовые провода, что уменьшает магнитные наводки на компас, а также простота и эстетичность монтажа. Но есть и очень серьезный недостаток, перечеркивающий достоинства: невозможность замены сгоревшего регулятора. При аварии с замыканием проводки в цепи мотора регулятор зачастую перегорает, и для быстрого ремонта достаточно иметь запасной регулятор, а перегоревший впоследствии можно не спеша наладить или приобрести еще один. В случае комбо-регулятора придется либо ремонтировать неисправный канал, что далеко не всегда осуществимо, либо покупать новый комбо-регулятор целиком.
Батарея и зарядное устройство
Суммарный пиковый ток, потребляемый моторами даже среднего мультикоптера, может достигать 70 А. Но при этом батарея должна быть как можно легче и иметь емкость, достаточную для полета как минимум 10 минут. Этим противоречивым требованиям лучше всего соответствуют литиевые аккумуляторы.
Существуют две основные модификации литиевых аккумуляторов: литий-ионные (Li-Ion) и литий-полимерные (LiPo, Li-Pol), отличающиеся типом электролита.
В литий-ионном аккумуляторе используется гелевый электролит, а в литий-полимерном- специальный полимер, насыщенный литийсодержащим раствором.
В моделизме используются именно литий-полимерные батареи, т. к. они способны отдавать больший рабочий ток, что в нашем случае критически важно. Другим весомым преимуществом литий-полимерных батарей является отсутствие жидкого электролита и возможность изготавливать более прочные плоские аккумуляторы произвольного размера. В мобильных телефонах, планшетах, фотоаппаратах и прочей бытовой электронике также используются литий-полимерные батареи, но они не рассчитаны на большой рабочий ток, поэтому от идеи использовать их в моделизме следует сразу отказаться. В остальном принципы работы, свойства и правила эксплуатации различных версий литиевых аккумуляторов не различаются.
Литий-полимерные батареи собирают из отдельных аккумуляторных ячеек, которые в обиходе традиционно называют "банками" (ри£. 2.23).